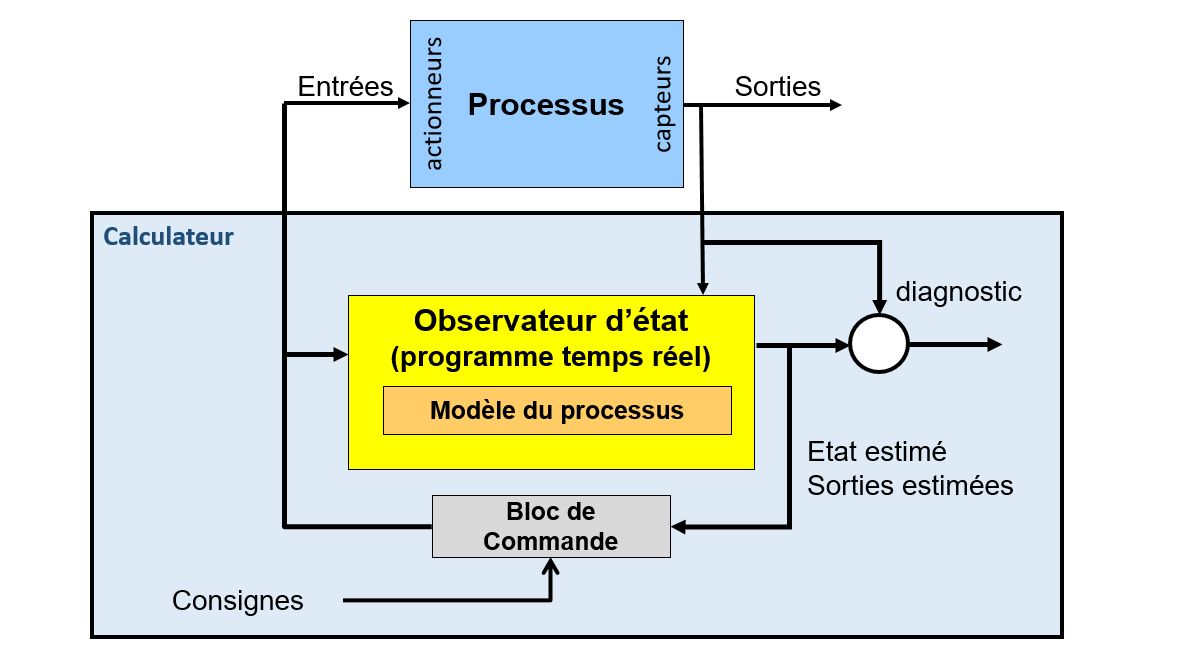
Vous apprendrez à construire un capteur logiciel pour estimer des variables d'un système dynamique qui ne sont pas directement mesurables. Cela se fait à partir de mesures disponibles et d'un modèle dynamique du processus.
En se cantonnant aux modèles linéaires, ceci est possible si la structure du modèle possède la propriété d'observabilité. L'étudiant apprend à tester cette propriété et à construire un observateur d'état qui permettra de reconstruire les variables estimées et de filtrer les mesures réalisées. L'approche déterministe est complétée par une approche statistique qui enrichit les informations de la fiabilité et la précision de cette estimation. Ceci permet alors de diagnostiquer des défauts (du système).
Vous serez sensibilisés au fait qu'un capteur logiciel peut également être déployé en redondance des capteurs physiques pour diagnostiquer leur fonctionnement.
Le filtre de Kalman est introduit en théorie et expérimenté dans des études de localisation de véhicule telles que celles liées aux véhicules autonomes (voitures, robots).
- Enseignant: Escareno Castro, Juan
- Enseignant: Stephant, Joanny